Animate Samples from a Gauss-Markov Posterior¶
We assume you’ve read the tutorial about animating a Gaussian distribution. This tutorial will explain how to use the animate_with* functionality in conjunction with the sampling routines in ProbNum.filtsmooth to animate a sample from a Gauss-Markov posterior.
[1]:
from probnumeval import visual
import numpy as np
import matplotlib.pyplot as plt
import probnum as pn
plt.style.use("../probnum-evaluation.mplstyle")
np.random.seed(42)
Let us start by constructing a simple filtering problem.
[2]:
locations = np.linspace(0, 2*np.pi, 100)
data = 0.5 * np.random.randn(100) + np.sin(locations)
We fit a once-integrated Brownian motion prior to this data.
[3]:
prior = pn.statespace.IBM(1, 1)
measmod = pn.statespace.DiscreteLTIGaussian(state_trans_mat = np.eye(1, 2), shift_vec=np.zeros(1), proc_noise_cov_mat=0.25 * np.eye(1))
initrv = pn.randvars.Normal(np.zeros(2), np.eye(2))
kalman = pn.filtsmooth.Kalman(prior, measmod, initrv)
regression_problem = pn.problems.RegressionProblem(observations=data, locations=locations)
posterior, _ = kalman.filtsmooth(regression_problem)
Let us start by visualizing this output
[4]:
t = np.linspace(0, 2*np.pi, 200)
mean = (posterior(t).mean @ np.eye(2, 1)).squeeze()
std = np.sqrt(np.eye(1, 2) @ posterior(t).cov @ np.eye(2, 1)).squeeze()
[5]:
fig, ax = plt.subplots(dpi=100)
ax.plot(t, mean, color="C0")
ax.plot(t, np.sin(t), color="gray", linestyle="dotted")
ax.fill_between(t, mean - 3*std, mean + 3*std, alpha=0.15, color="C0")
ax.plot(locations, data, marker=".", linestyle="None", color="C1")
plt.xlabel("$t$")
plt.ylabel("$x(t)$")
plt.show()
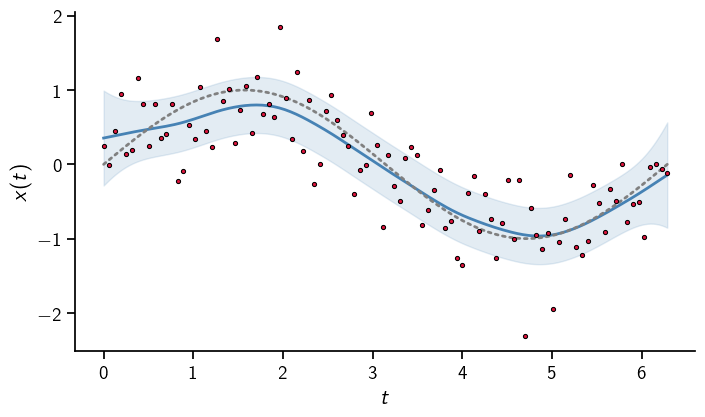
The true solution is captured well.
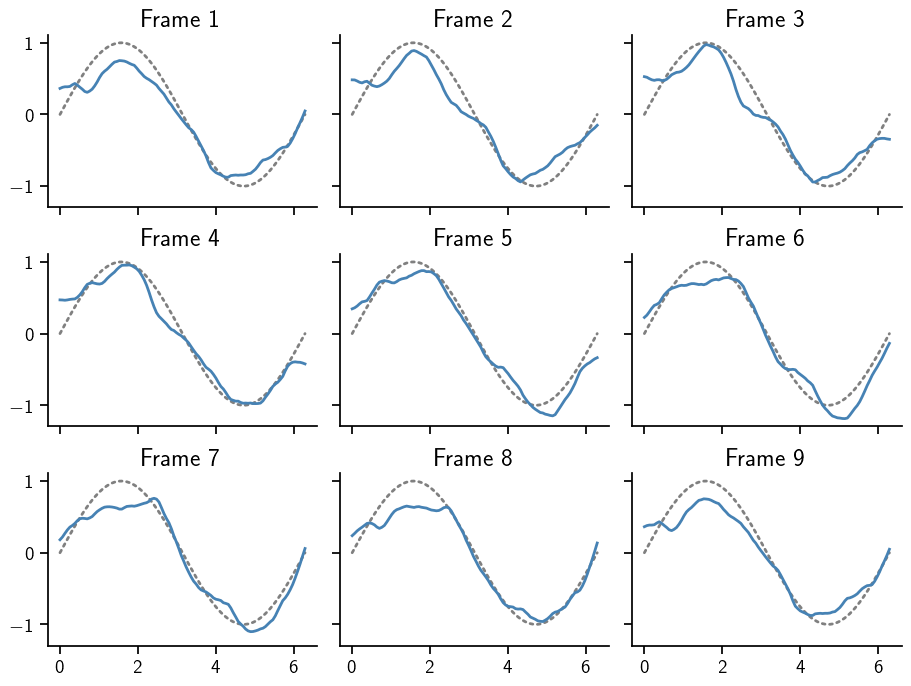
Next, we draw an animated samples on 12 frames from this posterior with the animate_with_great_circle_of_unitsphere function. Since the posterior has a 2-dimensional image, we generate 15 samples on a 200-dimensional sphere and reshape to get an (12, 100, 2) array.
[6]:
num_frames = 9
[7]:
base_measure_samples = visual.animate_with_great_circle_of_unitsphere(200, num_frames=num_frames, endpoint=True).reshape(num_frames, 100, 2)
print(base_measure_samples.shape)
(9, 100, 2)
To circumvent the posterior.sample() function, which itself draws samples from a standard Normal base measure and transforms them according to the rules specified by the posterior, we can call the transformation directly on the spherical pseudo-samples. We visualise those 15 samples in a plot of images (top left to bottom right).
[8]:
res = posterior.transform_base_measure_realizations(base_measure_samples, t=np.linspace(0., 2*np.pi, 100, endpoint=True))
[9]:
fig, axes = plt.subplots(dpi=100, ncols=3, nrows=num_frames // 3, sharey=True, sharex=True, figsize=(num_frames*1, num_frames*.75), constrained_layout=True)
for ax in axes.flatten():
ax.spines['right'].set_visible(False)
ax.spines['top'].set_visible(False)
for idx, (ress, ax) in enumerate(zip(res, axes.flatten())):
ax.plot(posterior.locations, np.sin(posterior.locations), color="gray", linestyle="dotted")
ax.plot(posterior.locations, ress @ np.eye(2, 1),)
ax.set_title(f"Frame {idx + 1}")
plt.show()
ODE Posteriors¶
The same functionality can be used to animate samples from an ODE solution. Here is how. Let us start with solving an ODE with ProbNum.
[10]:
def f(t, x):
return 5*x*(1-x)
y0 = np.array([0.1])
t0, tmax=0., 2.
[11]:
sol = pn.diffeq.probsolve_ivp(f, t0, tmax, y0, adaptive=False, step=0.1, algo_order=1)
# Some extrapolation to visualize uncertainty
t = np.union1d(np.linspace(t0, tmax + 0.5, 100), sol.locations)
solution = sol(t)
mean = solution.mean[:, 0]
std = solution.std[:, 0]
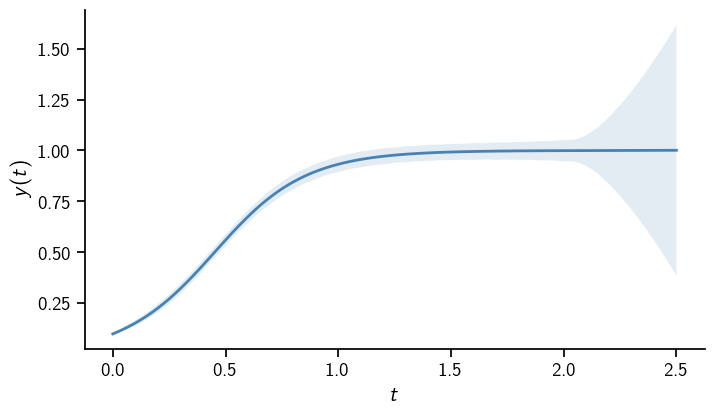
The solution is the usual logistic function. Note how the uncertainty drastically increases beyond the integration interval.
[12]:
fig, ax = plt.subplots(dpi=100)
ax.spines['right'].set_visible(False)
ax.spines['top'].set_visible(False)
ax.plot(t, mean)
ax.fill_between(t, mean - 3*std, mean + 3*std, alpha=0.15)
ax.set_xlabel("$t$")
ax.set_ylabel("$y(t)$")
plt.show()
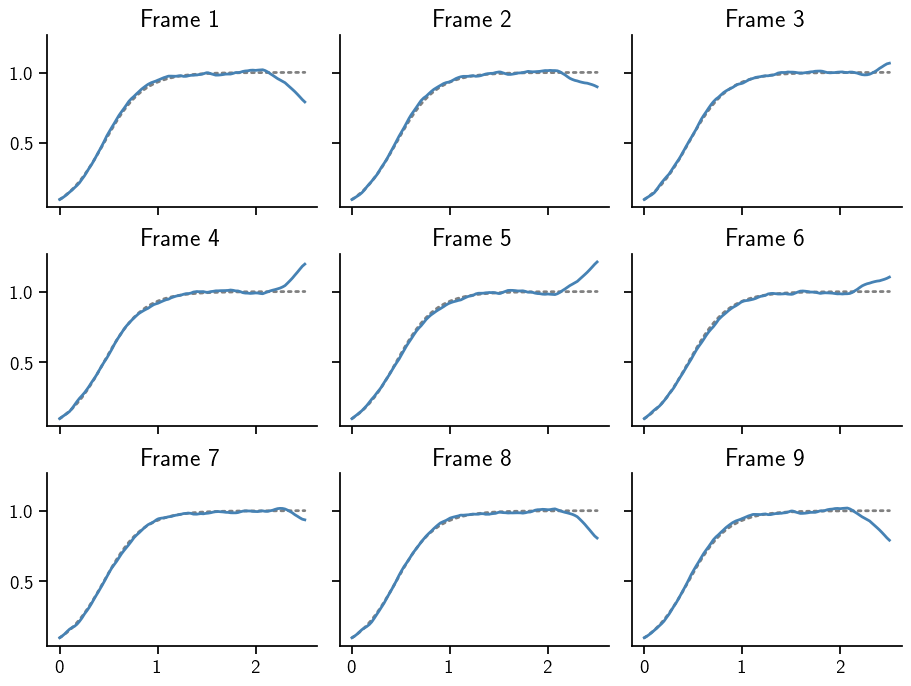
The solution of a probabilistic ODE solver is essentially a Kalman filter posterior. It even carries one, which can be used to transform base measure realizations (and extracting the dimension of the ODE solution).
[13]:
base_measure_samples = visual.animate_with_great_circle_of_unitsphere(2*len(t), num_frames=num_frames, endpoint=True).reshape(num_frames, len(t), 2)
res = sol.kalman_posterior.transform_base_measure_realizations(base_measure_samples, t=t)[:, :, 0]
This can be plotted in the same way as before. Note how beyond t=2, the sample moves a lot more than in the rest of the domain. This aligns with the marginal uncertainties plotted above.
[14]:
fig, axes = plt.subplots(dpi=100, ncols=3, nrows=num_frames // 3, sharey=True, sharex=True, figsize=(num_frames*1, num_frames*.75), constrained_layout=True)
for ax in axes.flatten():
ax.spines['right'].set_visible(False)
ax.spines['top'].set_visible(False)
for idx, (ress, ax) in enumerate(zip(res, axes.flatten())):
ax.plot(t, mean, color="gray", linestyle="dotted")
ax.plot(t, ress)
ax.set_title(f"Frame {idx + 1}")
plt.show()
To summarize, samples from a Gauss-Markov posterior can be animated in the same way as samples from a multivariate Gaussian. This is true, because ProbNum algorithms provide a method that transforms samples of a base measure into samples from a posterior.